FreeRTOS 任务的状态
在xTaskCreate函数创建任务时,即为任务赋予了优先级。可以使用vTaskPrioritySet函数来修改任务的优先级,它的第一个参数是任务句柄、第二个参数是优先级,这个函数必须在调度器启动之后才能调用。相应的,uxTaskPriority函数返回一个任务的优先级。
#include <task.h>
void vTaskPrioritySet(TaskHandle_t xTask,UBaseType_t uxNewPriority);
UBaseType_t uxTaskPriorityGet(TaskHandle_t xTask);
//返回任务的优先级
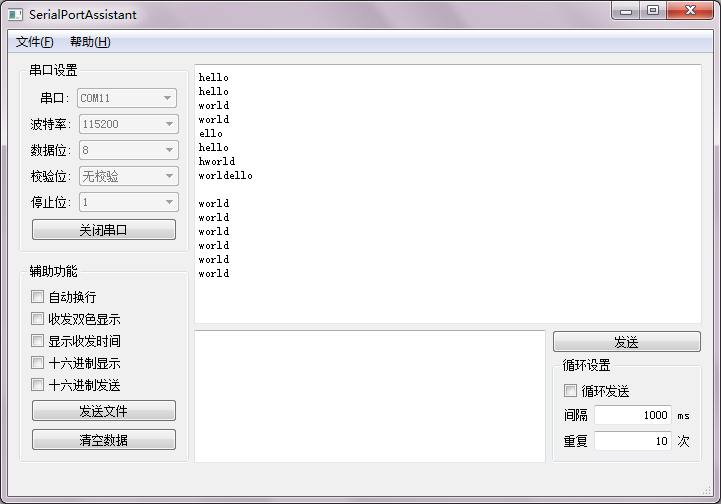
对于优先级相同的任务,FreeRTOS采用时间片轮询调度,每个任务轮流执行一段微小的时间。下面这段代码创建两个优先级相同的任务打印串口消息:
#include <stm32f4xx.h>
#include <FreeRTOS.h>
#include <task.h>
#include <uart.h>
void task1(void* args);
void task2(void* args);
int main()
{
//配置USART1
USART1_Config();
//创建任务
TaskHandle_t h1,h2;
xTaskCreate(task1,"task1",configMINIMAL_STACK_SIZE,"hello\n",1,&h1);
xTaskCreate(task2,"task2",configMINIMAL_STACK_SIZE,"world\n",1,&h2);
//开启任务调度
vTaskStartScheduler();
while(1);
}
void task1(void* args)
{
int i = 0;
while(1)
{
//循环5次后删除自己
if(i >= 5)
{
vTaskDelete(NULL);
}
//打印参数
USART_printf(USART1,args);
i++;
}
}
void task2(void* args)
{
int i = 0;
while(1)
{
//循环10次后删除自己
if(i >= 10)
{
vTaskDelete(NULL);
}
//打印参数
USART_printf(USART1,args);
i++;
}
}
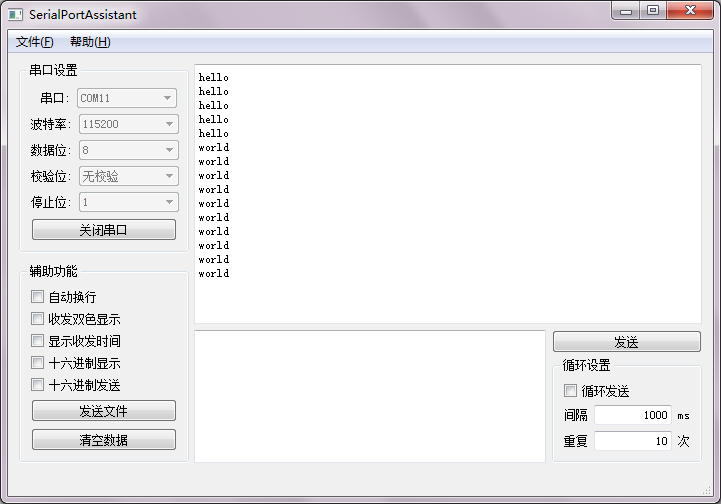
对于优先级不同的任务,FreeRTOS采用抢占式调度,高优先级的任务优先执行。将上面代码中的task1优先级设为2,task1会优先执行:
#include <stm32f4xx.h>
#include <FreeRTOS.h>
#include <task.h>
#include <uart.h>
void task1(void* args);
void task2(void* args);
int main()
{
//配置USART1
USART1_Config();
//创建任务
TaskHandle_t h1,h2;
xTaskCreate(task1,"task1",configMINIMAL_STACK_SIZE,"hello\n",2,&h1);
xTaskCreate(task2,"task2",configMINIMAL_STACK_SIZE,"world\n",1,&h2);
//开启任务调度
vTaskStartScheduler();
while(1);
}
void task1(void* args)
{
int i = 0;
while(1)
{
//循环5次后删除自己
if(i >= 5)
{
vTaskDelete(NULL);
}
//打印参数
USART_printf(USART1,args);
i++;
}
}
void task2(void* args)
{
int i = 0;
while(1)
{
//循环10次后删除自己
if(i >= 10)
{
vTaskDelete(NULL);
}
//打印参数
USART_printf(USART1,args);
i++;
}
}
FreeRTOS中任务存在4种状态:运行、就绪、阻塞和挂起。调度器总是让运行和就绪状态的任务中,优先级最高的任务进入运行状态。
| 状态 | 说明 |
|---|---|
| 运行状态(Running) | 正在运行的任务处于运行状态 |
| 就绪状态(Ready) | 可以运行但没有运行的任务处于就绪状态 |
| 阻塞状态(Blocked) | 等待某一事件而不能运行的任务处于阻塞状态 |
| 挂起状态(Suspended) | 调用vTaskSuspend挂起的任务处于挂起状态 |
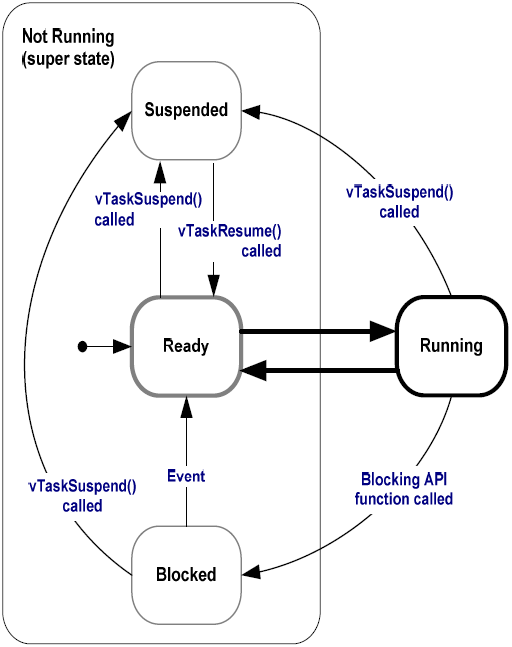
运行状态的任务可以通过调用阻塞函数进入阻塞状态,阻塞解除的事件可以让阻塞状态的任务进入就绪状态,vTaskSuspend函数让任务进入挂起状态,vTaskResume函数让挂起的任务进入就绪状态。
vTaskDelay是一个阻塞函数,它让任务进入阻塞状态等待一个定时事件,它的参数是定时事件的延时时间(周期数)。当定时时间到达,就会产生定时事件,让任务进入就绪状态。
#include <task.h>
void vTaskDelay(const TickType_t xTicksToDelay);
宏portTICK_RATE_MS表示每毫秒的周期数,用期望延时的毫秒数除以她可以得到相应的周期数,例如vTaskDelay(1000/portTICK_RATE_MS)延时1000毫秒。
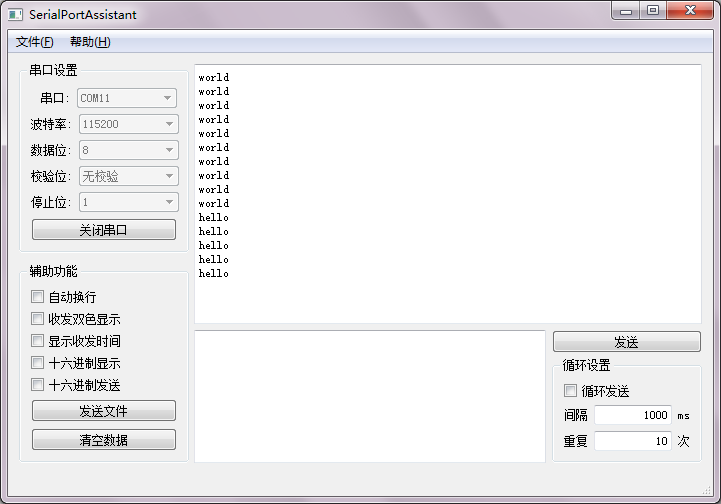
仍然让task1的优先级高于task2,在task1中调用vTaskDelay阻塞,在task1阻塞期间,task2是优先级最高的任务,因此运行task2:
#include <stm32f4xx.h>
#include <FreeRTOS.h>
#include <task.h>
#include <uart.h>
void task1(void* args);
void task2(void* args);
int main()
{
//配置USART1
USART1_Config();
//创建任务
TaskHandle_t h1,h2;
xTaskCreate(task1,"task1",configMINIMAL_STACK_SIZE,"hello\n",2,&h1);
xTaskCreate(task2,"task2",configMINIMAL_STACK_SIZE,"world\n",1,&h2);
//开启任务调度
vTaskStartScheduler();
while(1);
}
void task1(void* args)
{
int i = 0;
//阻塞1000ms
vTaskDelay(1000/portTICK_RATE_MS);
while(1)
{
//循环5次后删除自己
if(i >= 5)
{
vTaskDelete(NULL);
}
//打印参数
USART_printf(USART1,args);
i++;
}
}
void task2(void* args)
{
int i = 0;
while(1)
{
//循环10次后删除自己
if(i >= 10)
{
vTaskDelete(NULL);
}
//打印参数
USART_printf(USART1,args);
i++;
}
}
挂起状态的任务对于调度器而言是不可见的。vTaskSuspend让任务进入挂起状态,vTaskResume让挂起的任务进入就绪状态,它们的参数都是要操作任务的句柄。
#include <task.h>
void vTaskSuspend(TaskHandle_t xTaskToSuspend);
void vTaskResume(TaskHandle_t xTaskToResume);